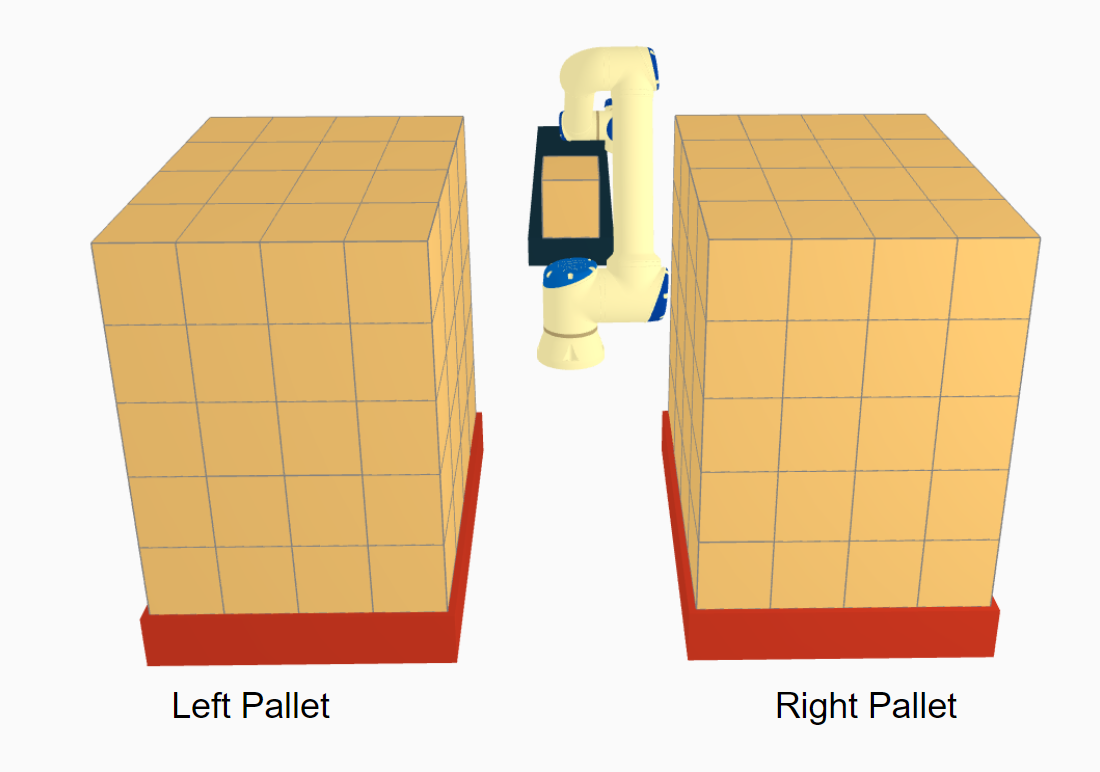
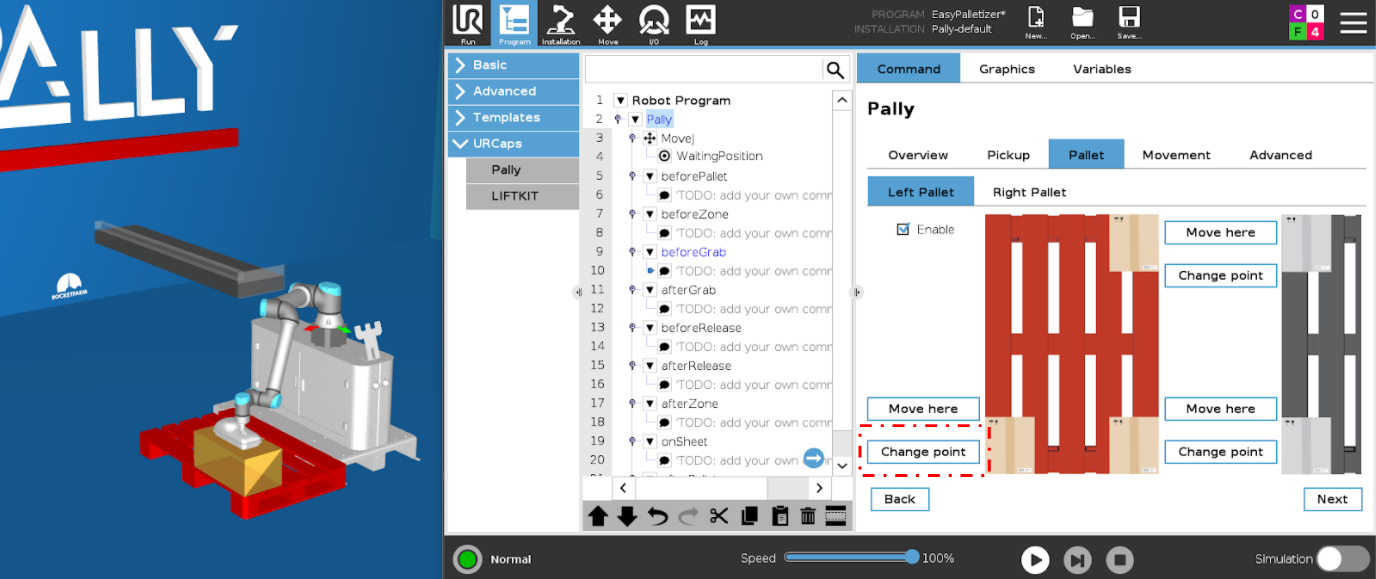
Each pallet has three calibration points. When calibrating the three points
...
it is important to keep
...
orientation of the gripper the same way.
...
| Status | ||||
|---|---|---|---|---|
|
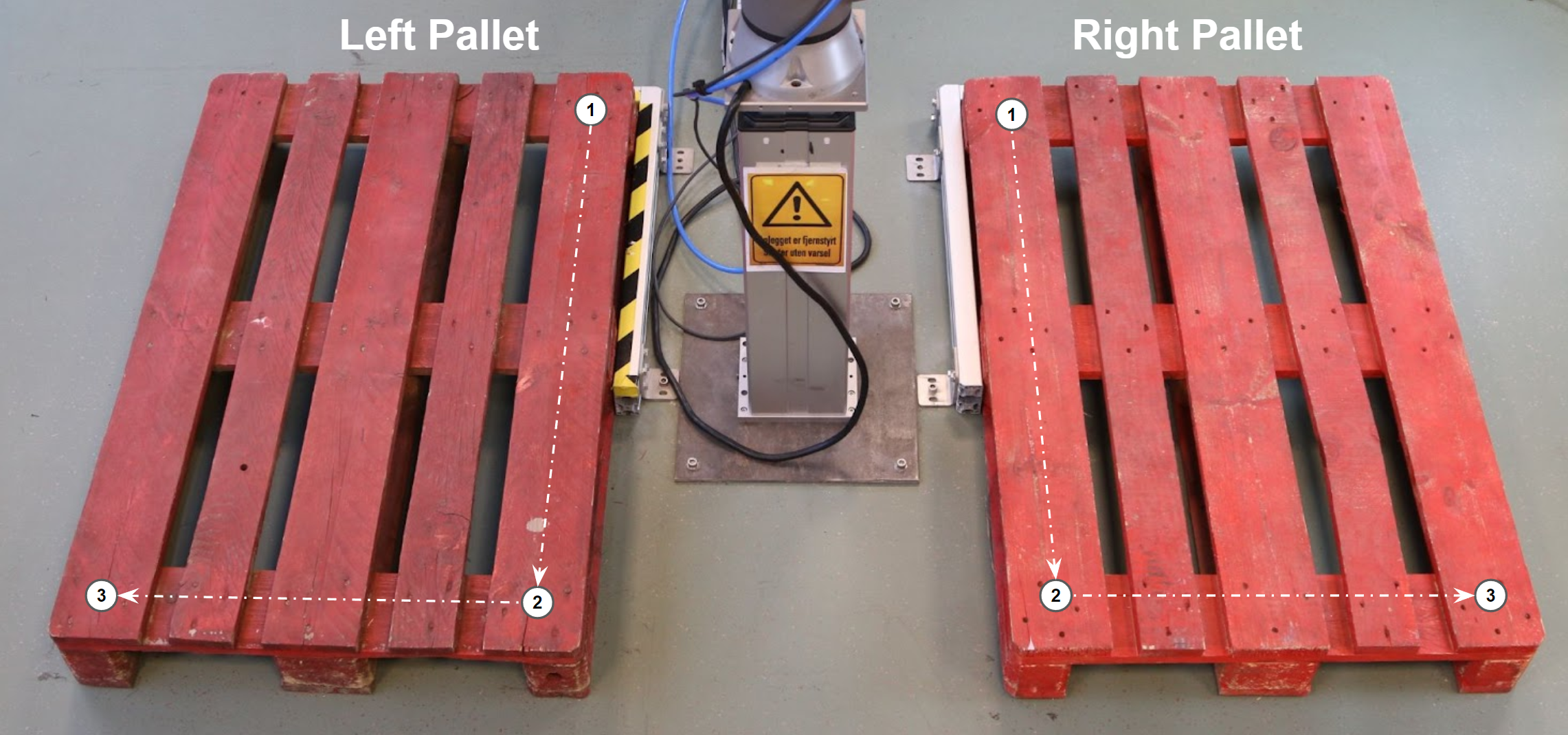
Recommended calibration steps
Left Pallet
Upper right corner
Down right corner
Down left corner
Right Pallet
Upper left corner
Down left corner
Down right corner
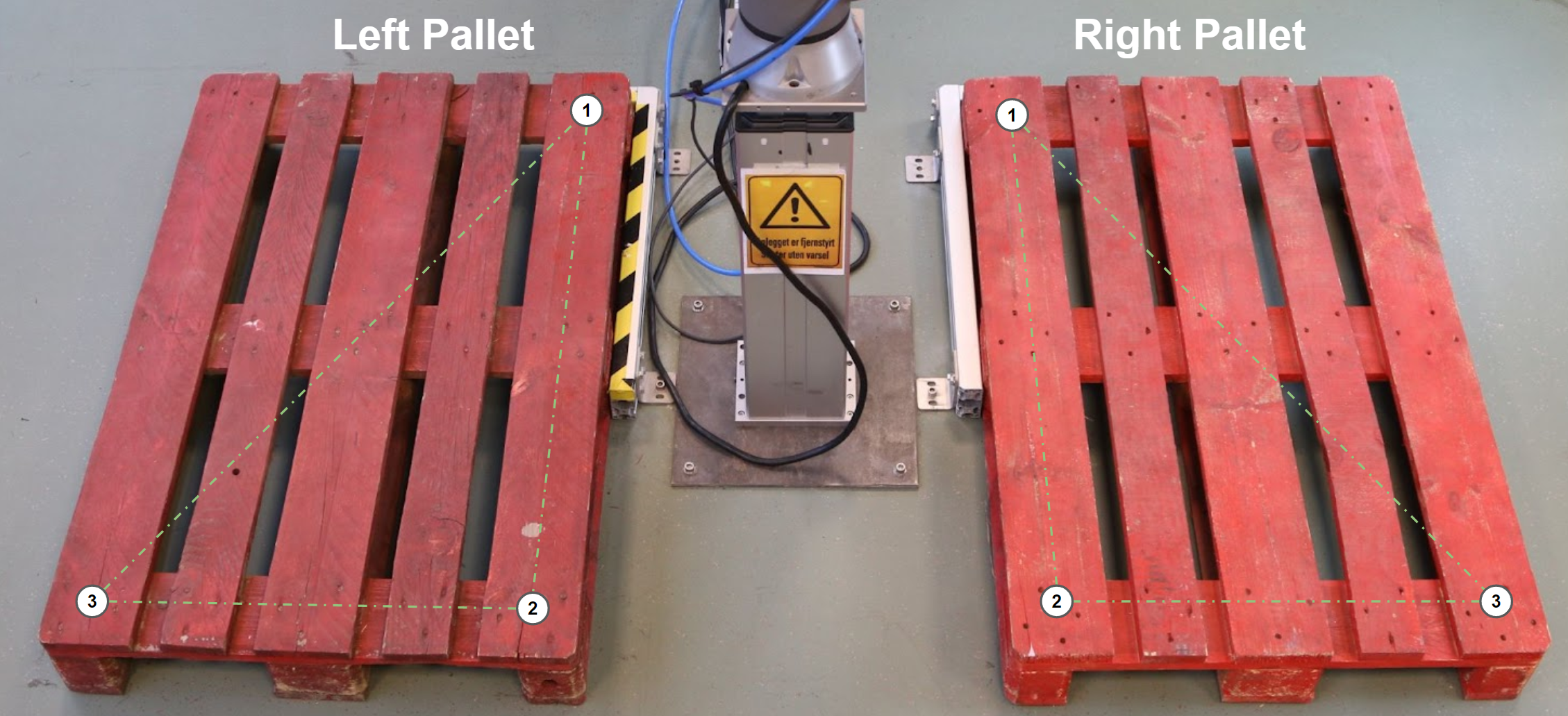
The calibration steps will mathematical create a rectangle and check for these statuses:
Pallet orientation
Floor skewness
Origin point (step 1 corner)
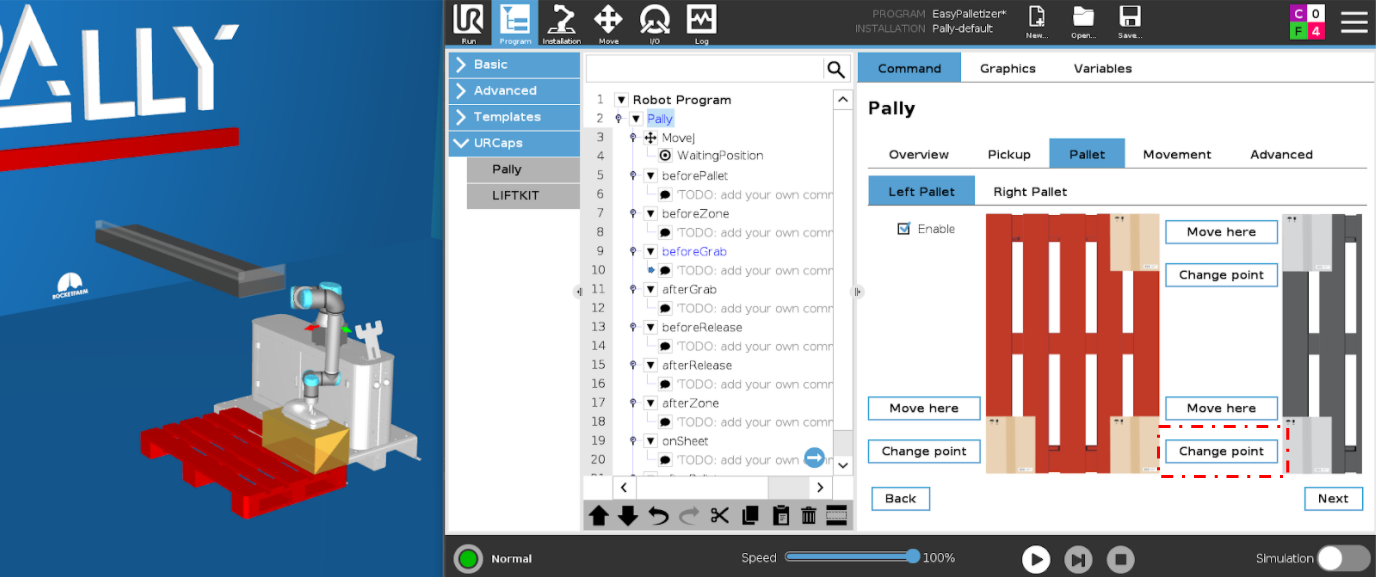
Place the calibration box in any of the corners and place the gripper perfectly in the center on top. Save the position by pressing the Change position button.
...
Repeat this
...
process for all three corners
...
shown on the screen.

| Info |
|---|
Expert tip: Calibrate the pickup position with the gripper perfectly in the center of the box, then turn on the vacuum so that the box attaches to the gripper. You now have an good relation between the griper, box and the pallet. Move the robot down to the corners of the pallet to calibrate. |
| Info |
|---|
Note: |
...
The gripper/tool connector |
...
must face the same direction on all three calibration points. |
If you are still not satisified with the calibration accuracy, use the following script code for fine tuning alternatives.