...
Timer for counting how long a full pallet would take. The value is presented in the RUN screen
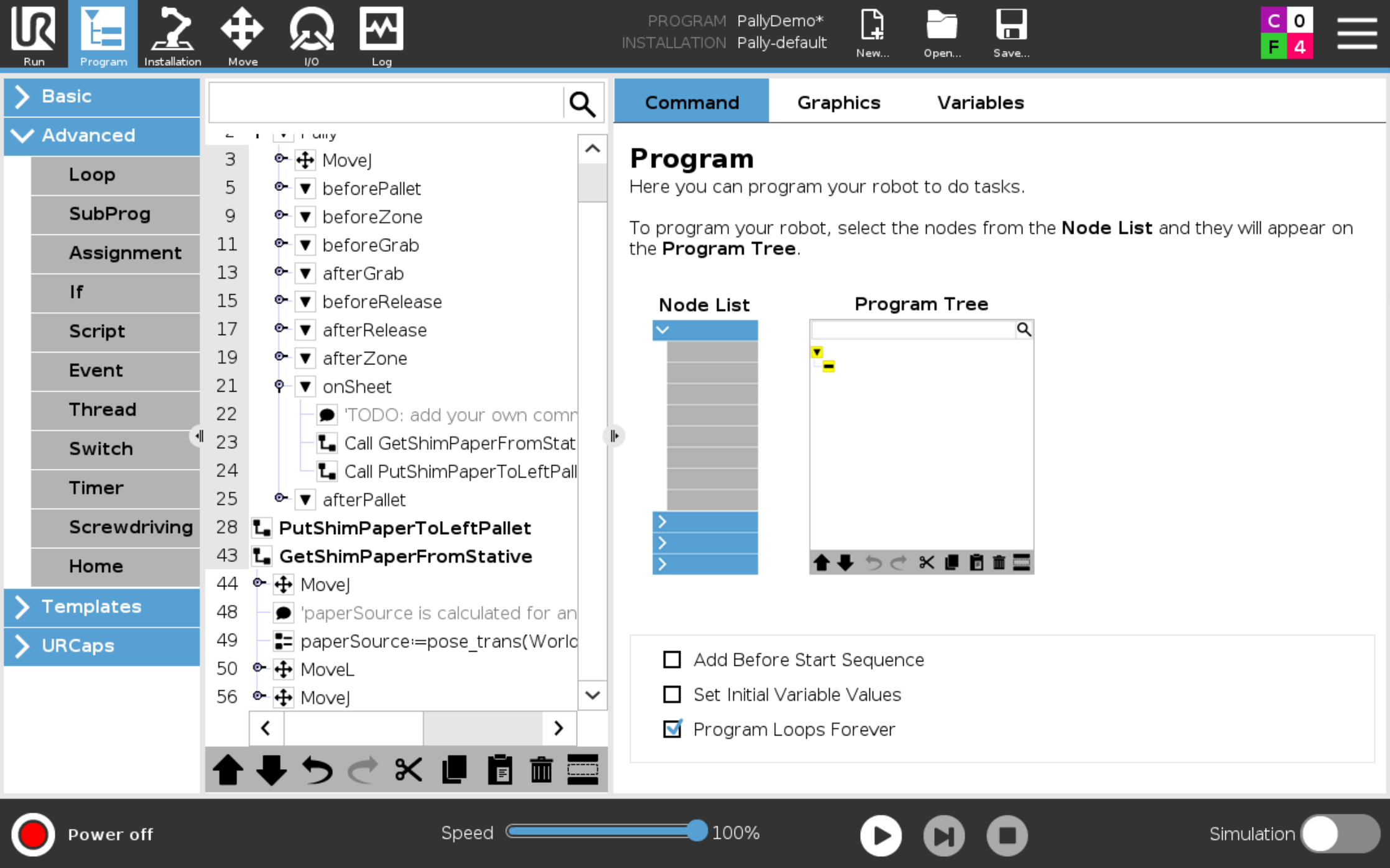
2. Shim paper routine
The entry point of a user defined shim paper routine is the onSheet callback. Put your code here to define a robot trajectory suitable for inserting shim papers between layers.
...
URP’s is added outside the program and called on from the onSheet Callback
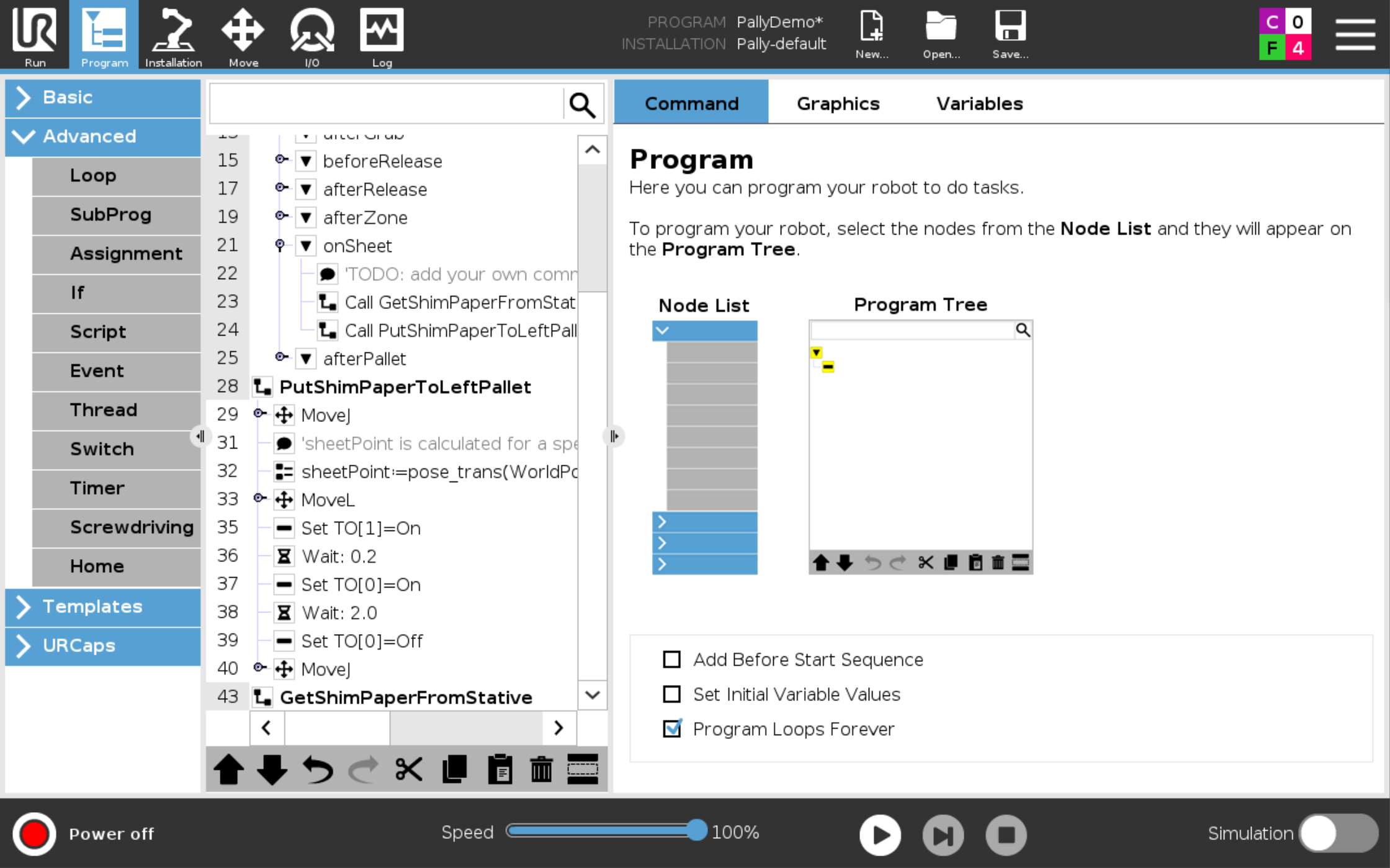
PutShimPaperToLeftPallet.URP: Customize your own movements for placing paper onto the pallet
...
For better readability, we have extracted the shim paper logic into two separated subprograms:
get the shim paper from the tray, and
put the shim paper on the pallet.
Picking shim paper from a tray is common for both left and right pallets
...
Moving the shim paper to each pallet may be impemented separately
3. Change optimizer parameters for the next box
The entry point for changing optimizer parameters is typically the onNextTask callback, which is executed before all calculations begin.
...
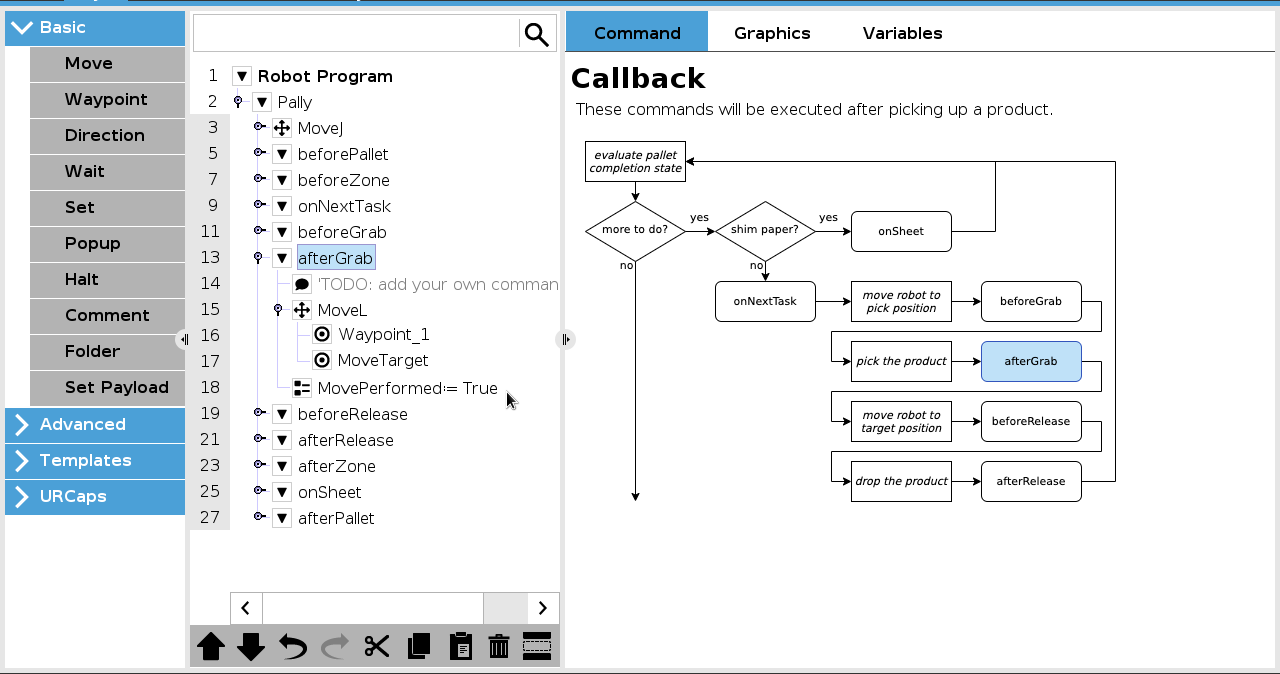
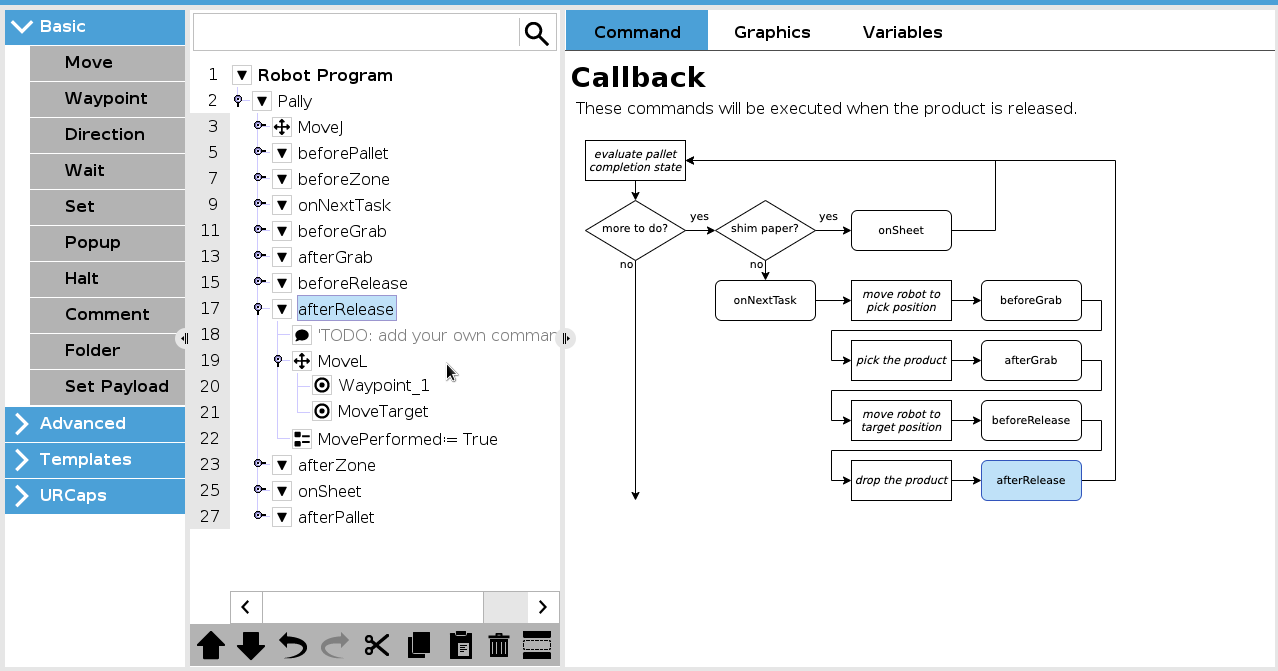
4. Custom path
Control the robot motion directly when specfic events occur.
Please note: due to the parallel processing architecture in Pally, it is not possible to move the robot directly in the onNextTask callback: the robot may be still moving back from the previous target position when the new calculations start. Trying to move the robot would cause “Another thread is controlling the robot” error followed by protective stop. When using custom path towards the pick position follow these steps:
set
MovePerformed = Truein theonNextTaskcallback in advance, butmove the robot to the
MoveTargetposition only inbeforeGrab
The MoveTarget variable is not yet valid in the onNextTask callback.
...