Adding shim paper in the Pallet Builder
Download files at the bottom of the page
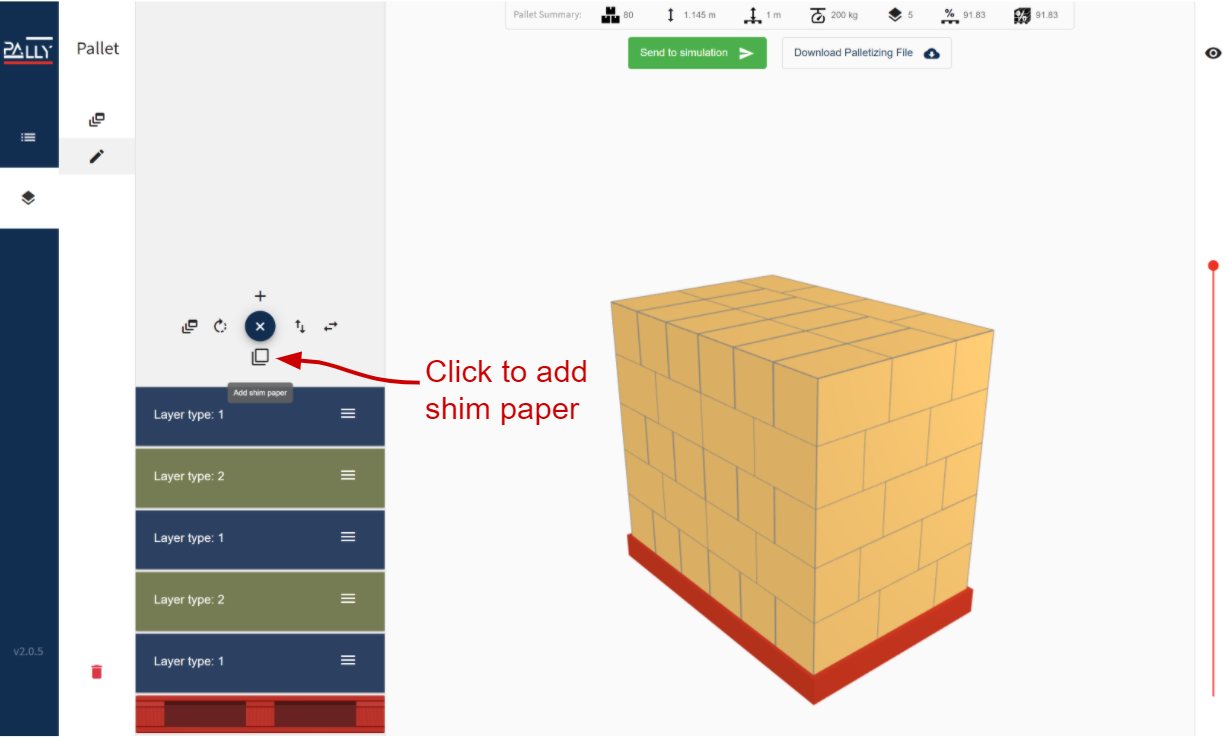
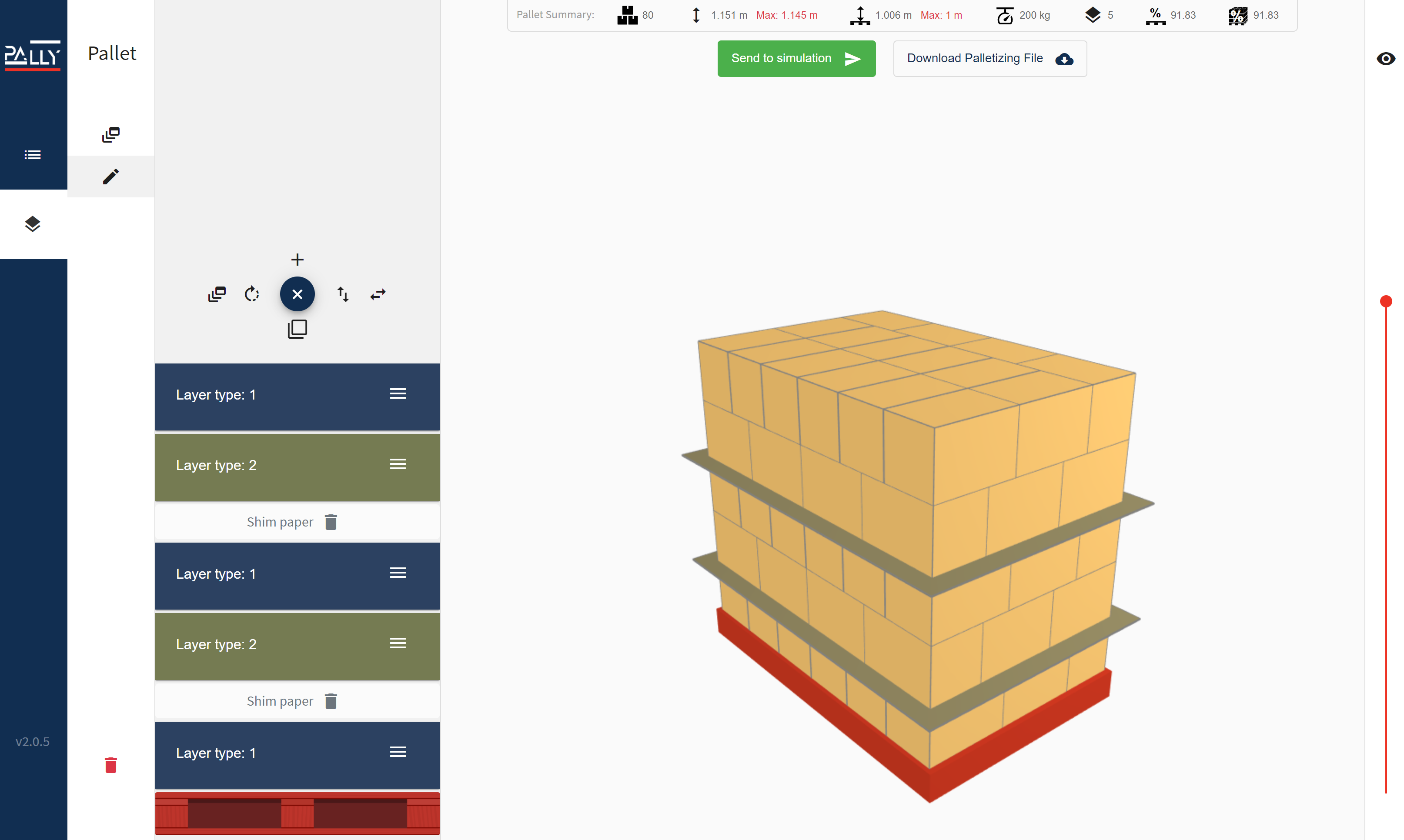
Click the shim paper button as many times as there should be shim paper in the project. Drag the shim paper layer to the correct position on the pallet.
Adding a shim paper routine on the robot
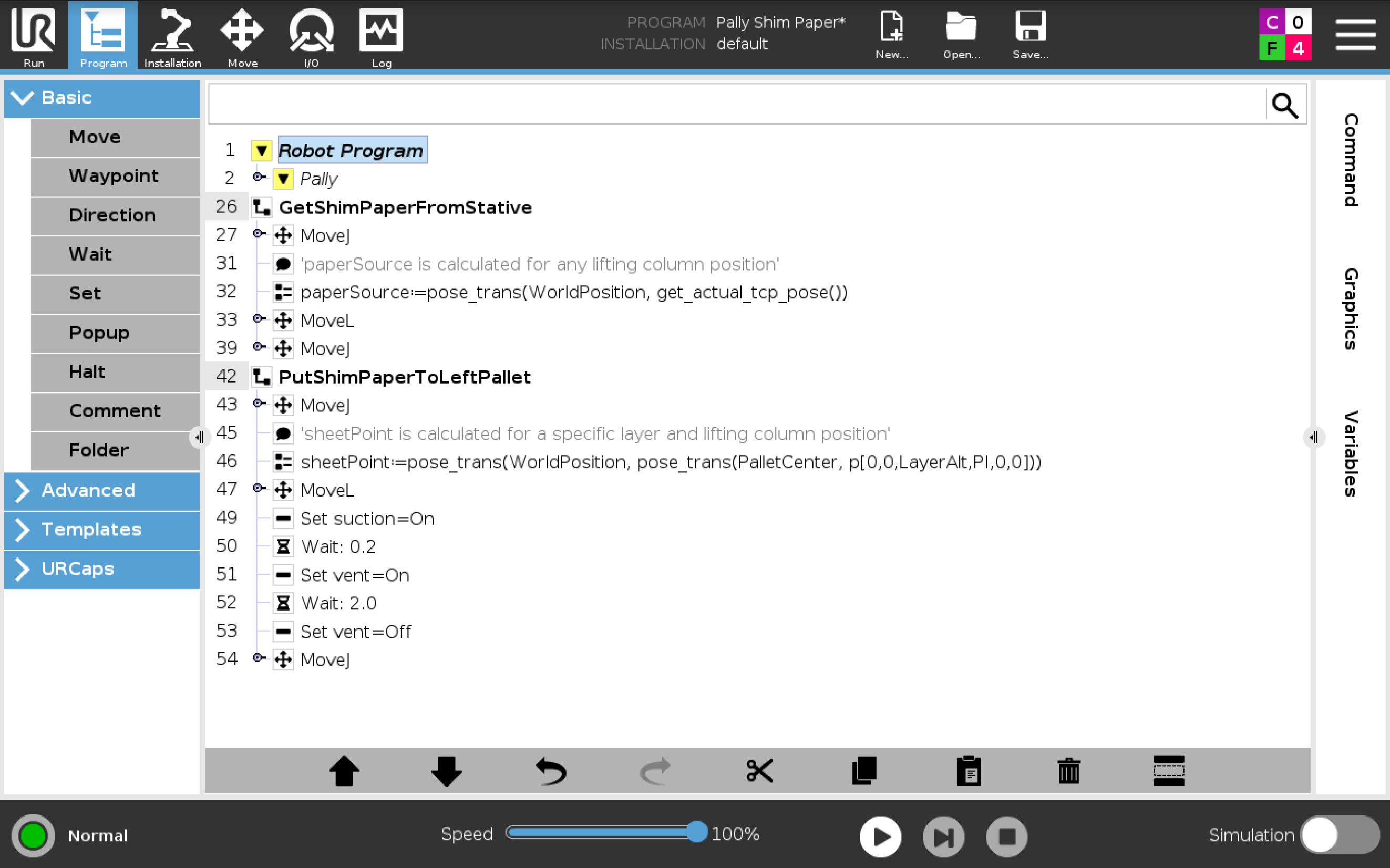
GetShimPaperFromStative and PutShimPaperToLeftPallet code added into the program tree
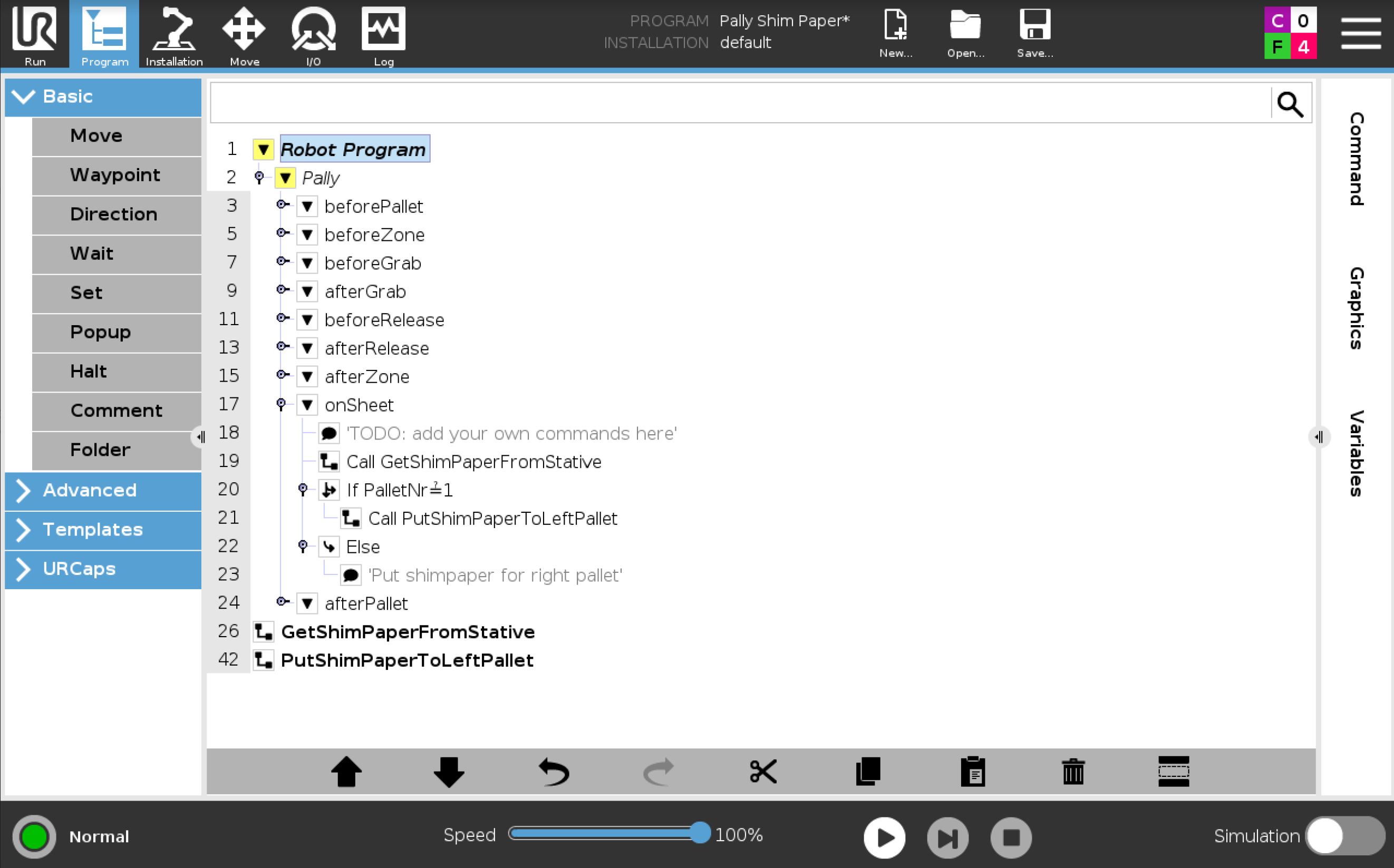
GetShimPaperFromStative and PutShimPaperToLeftPallet sub call from onSheet Callback
Example: Using shim paper with Pally
Including example programs
GetShimPaperFromStative
PutShimPaperToLeftPallet
Use example programs as SubPrograms in the onSheet() callback, see photos (Program node example1 and Program node example2).
The robot picks a paper from the paper source, then moves it on the top of the current layer of the selected pallet (left pallet in this example).
Important things here:
calculate the altitude of the paper source when the robot is on a lifting column: use the global Pally variable "WorldPosition" as shown in the example:
paper_source = pose_trans(WorldPosition, get_actual_tcp_pose())
movel(paper_source)
calculate the shim paper position on the pallet by using the global Pally variables "WorldPosition" (lifting column only), "PalletCenter", and "LayerAlt"
If shim paper is NOT picked in the center
sheet_point = pose_trans(WorldPos, pose_trans(PalletCenter, p[0,0,LayerAlt, 3.1415, 0, 0]))
movel(sheet_point)
In this simple example, the gripper is exactly at the center point of the shim paper.
If shim paper is NOT picked in the center
In order to have an offset from the center point, add nonzero values for the x and y coordinates in the transformation as shown below:
sheet_point = pose_trans(WorldPos, pose_trans(PalletCenter, p[X, Y, LayerAlt, 3.1415, 0, 0]))
where X and Y are the corresponding distances of the TCP from the center point of the shim paper (in the Cartesian coordinate system of the current TCP)
Download