You can select different gripper orientations at pickup to have better reach for the box onto the palletIn order to get better reach or performance, the program can automatically recalculate and use the gripper rotated by +90, -90, 180 degrees at the pickup position. This may be necessary to reach the pallet corners or avoid collision with the base frame.
The allowed rotations can be configured. You can instruct the optimizer to enforce the default orientation, choose between forward and backward, or choose between forward, backward, left, or right. Pally will calculate the best optimize optimized grip for each box, if enabled.
Optimize gripper options: NONE - 2-WAY - 4-WAY
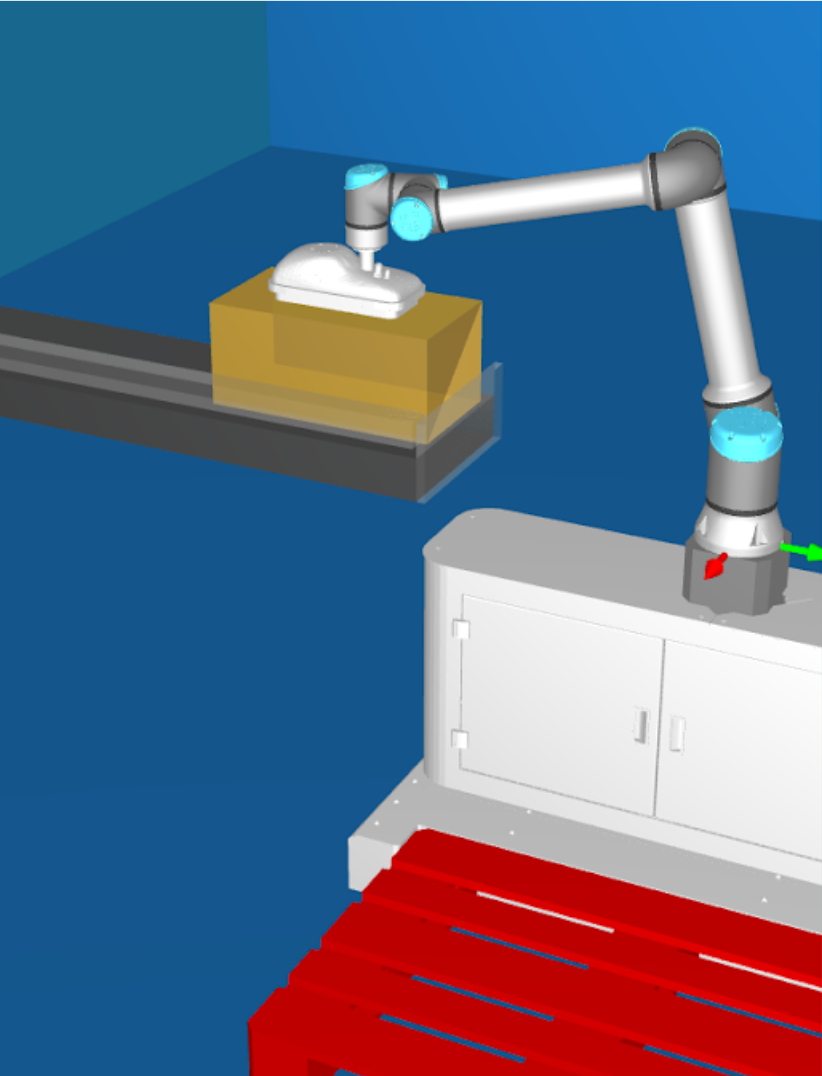
None: InFrontVisual representation of the different gripper rotations at pickup
| Info |
|---|
Note: the rotations are relative to the default calibrated orientation (forward) |
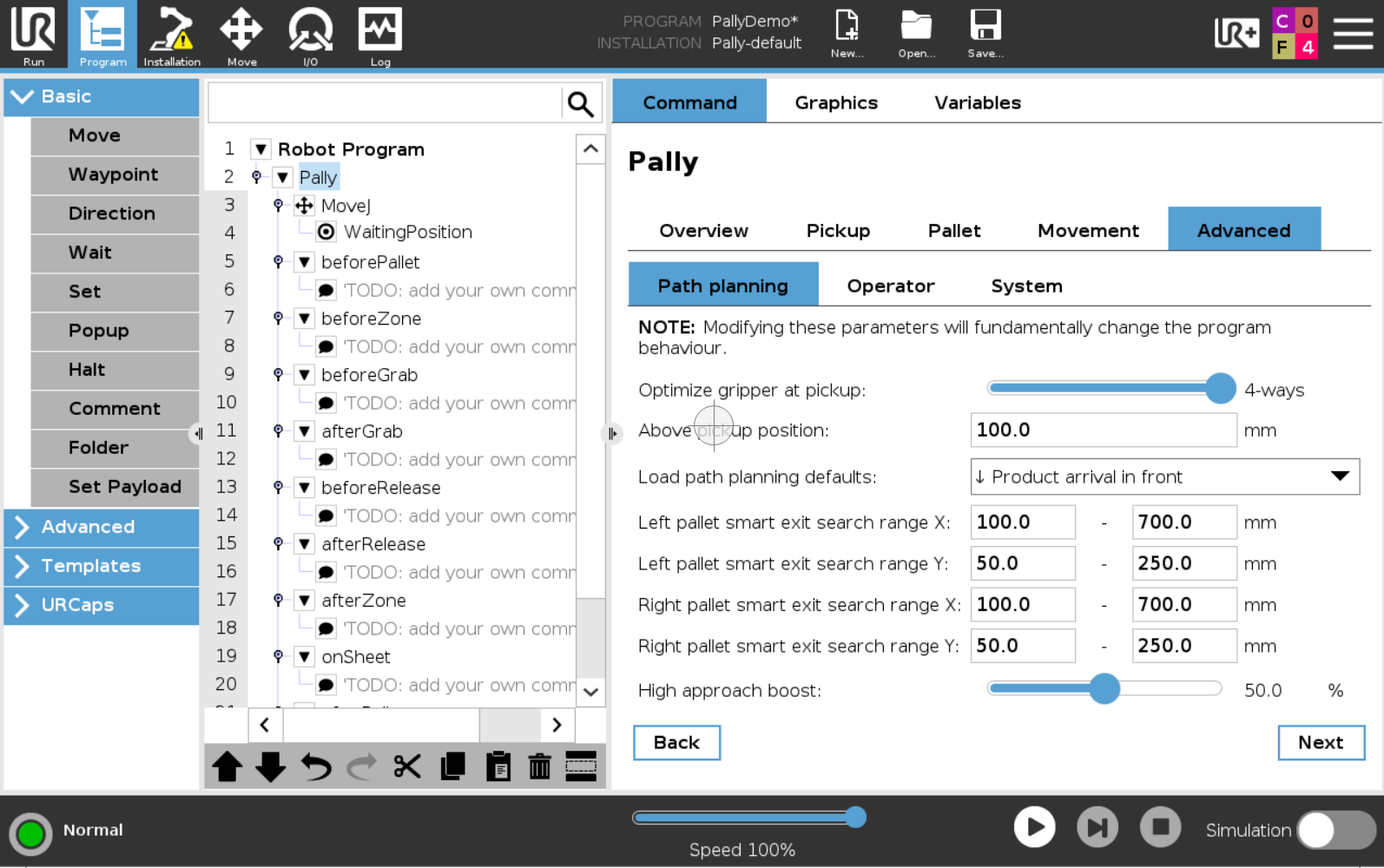
Gripper optimization settings can be selected in Program / Pally / Advanced / Path planning
None: forward (the gripper direction at the calibrated pick position)
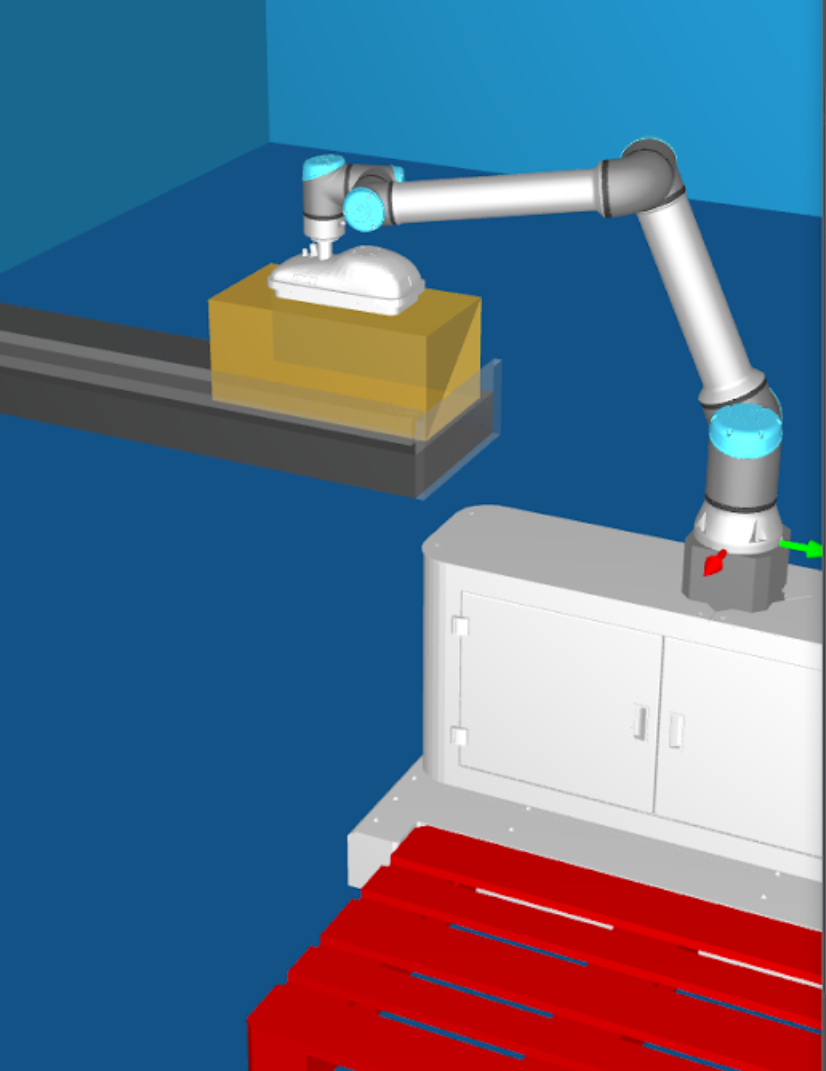
2-Way: InFront forward and InBackbackward
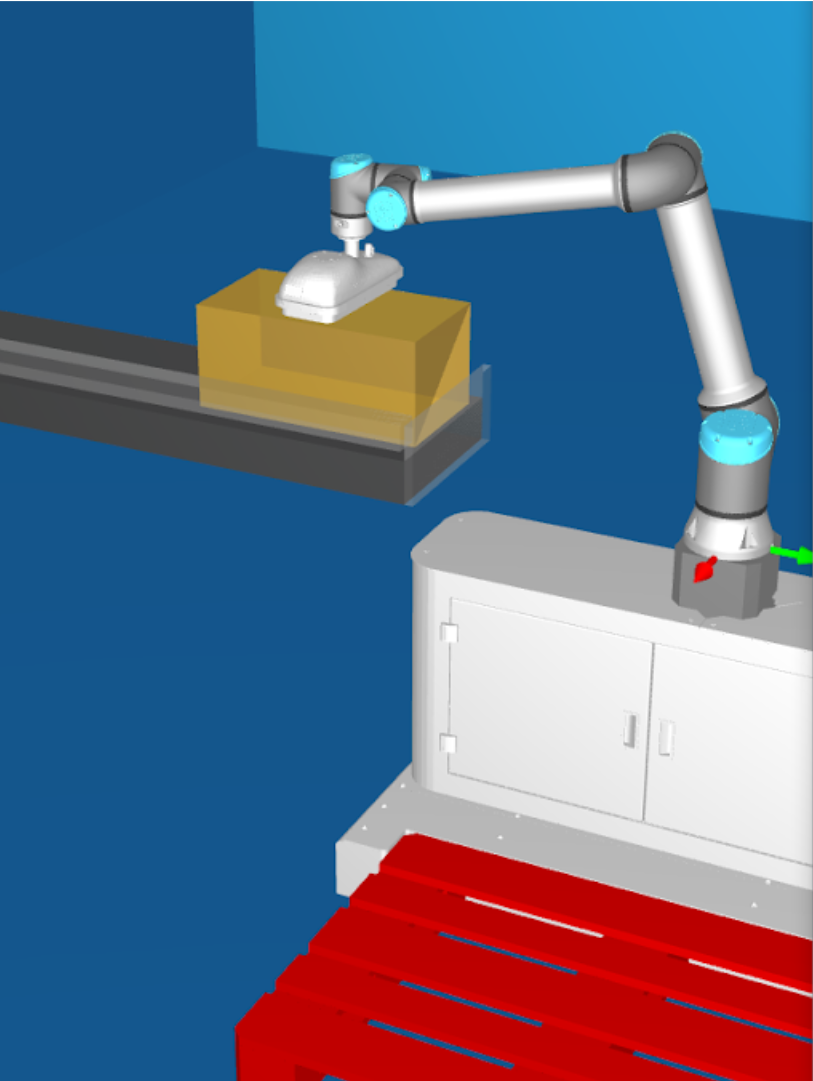
4-Way: InFront forward, backward, InLeftleft, InBack and InRightright
Visual representation of the different optimize gripper options
InFront
InBack
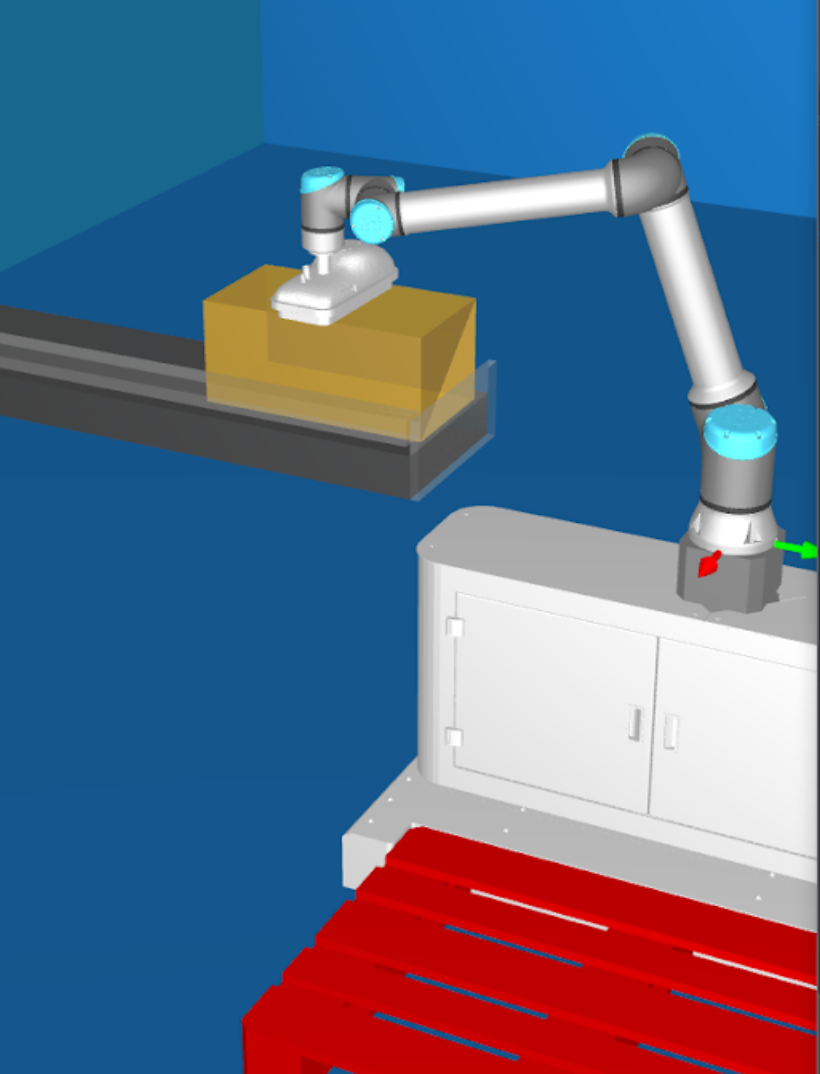
InLeft
InRight
Info
The first element is the number of allowed rotations n,
The next n elements are the allowed rotations in degrees.
0: calibrated orientation
90: right orientation
-180: backwards orientation
-90: left orientation
Example:
| Code Block |
|---|
rf_grip_rot = [3, 0, -90, 90, 0] |
This will tell the optimizer to choose a gripper rotation between forward, left, and right (backward is not allowed)
If you want to limit the allowed gripper rotation to left and right you need to use the following Example:
| Code Block |
|---|
rf_grip_rot = [2, 90, -90, 0, 0] |
If you want to use this in a particular pattern, The best place for this script line is the BeforeZone callback. Here you can check the name of the pattern, and set rf_grip_rot accordingly.
| Info |
|---|
Please note: rf_grip_rot is used as a default value to initialize the optimizer, but gripper rotation in the pattern file has priority. If you have set the enforced gripper rotation in the pattern Json file (MyRobot.cloud knowledge base - Edit pattern and box) for one or more box positions, this will override rf_grip_rot. You can always enforce any gripper rotation(s) in the pattern file independent of the default gripper optimizer settings. |
Rotation direction
Pally will automatically choose rotation direction between pickup and placing the box, as well as the rotation direction between placing the box and picking up the next box. This is done to avoid Wrist 3 errors, where to robot rotates more then 360 degrees and the palletizing operation is stopped by protective stop.
This automatic rotation direction can not be overruled.
You can reduce rotation by locking gripper orientation and box orientation, but you can not set a desired rotation direction.